Introduction
Accurate and current mapping of large-scale environments is of paramount importance for a wide range of applications, including urban planning, infrastructure management, environmental monitoring, and resource management. However, traditional mapping methods can be time-consuming, expensive, and struggle to keep up with the rapid pace of change in many areas. By leveraging the collective efforts of individuals equipped with LiDAR sensors, we can revolutionize the way we map and understand our world. Crowdsourced mapping allows us to rapidly collect and aggregate vast amounts of highly accurate 3D data, enabling the creation of detailed maps that would be impractical or prohibitively expensive using conventional methods.
This competition aims to showcase the potential of crowdsourced mapping and foster innovation in this field. Participants will have the opportunity to contribute their skills and efforts to map large-scale environments, pushing the boundaries of what is possible and demonstrating the power of collaborative mapping.
The Challenge
Dataset
This challenge will take place primarily on M2DGR Dataset. M2DGR is a novel large-scale dataset collected by a ground robot with a full sensor-suite including six fish-eye and one sky-pointing RGB cameras, an infrared camera, an event camera, a Visual-Inertial Sensor (VI-sensor), an inertial measurement unit (IMU), a LiDAR, a consumer-grade Global Navigation Satellite System (GNSS) receiver and a GNSS-IMU navigation system with real-time kinematic (RTK) signals. The ground truth trajectories were obtained by the motion capture device, a laser 3D tracker, and an RTK receiver.
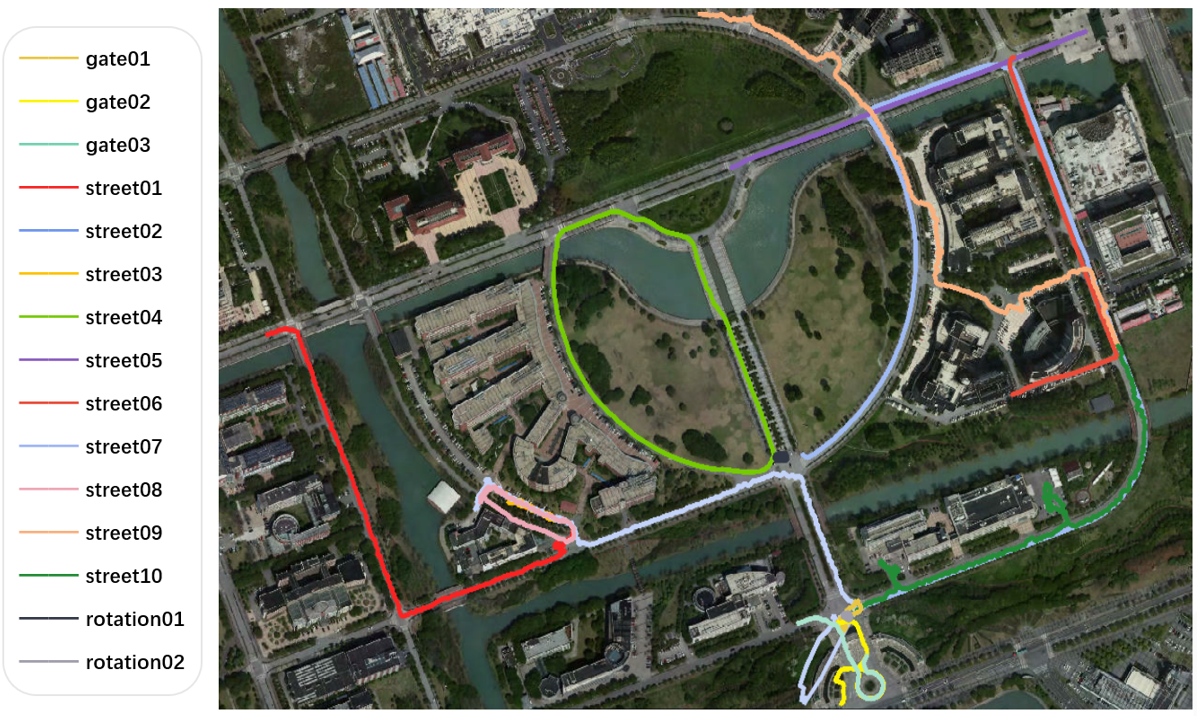
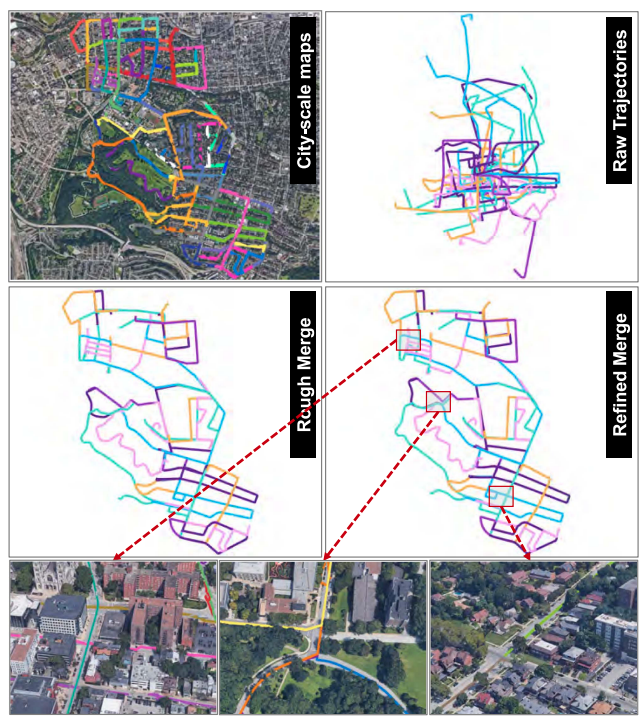
The dataset comprises 36 sequences (about 1TB) captured in diverse scenarios including both indoor and outdoor environments. There are many overlapping areas between these sequences, which facilitates resembling between trajectories. In addition, some trajectories were recorded in challenging scenarios like lifts, complete darkness, etc, which bring more challenges to this task.
Schedule
| Date | Event |
|---|---|
| May 15 2024 | Online Submission Open |
| May 16 2024 | Release of Data |
| June 20 2024 | Competition Deadline |
| June 30 2024 | Award Decision Announcement |
Awards
1st Place Cash $3000 + CERTIFICATE
This award will be given to one competitor.
2nd Place Cash $4000 + CERTIFICATE
This award will be given to two competitors, an amount of $2000 will be given to each one.
3rd Place Cash $3000 +CERTIFICATE
This award will be given to three competitors, an amount of $1000 will be given to each one.
Contact
If you have any questions, please contact ryanzhao9459@gmail.com.
Invited Talkers

Danping Zou |

Fu Zhang |

Fei Gao |

Boyu Zhou |
Hang Zhao |

Chen Wang |

Xieyuanli Chen |