Published: May 13, 2023 by C.S. Rhymes
Background and Major Contributions
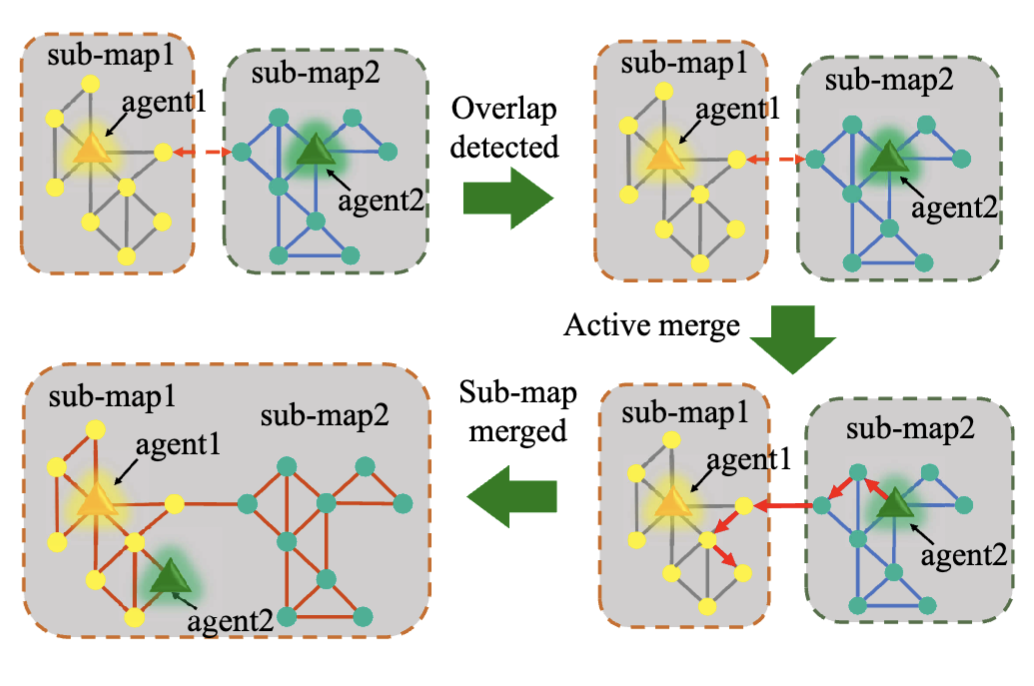
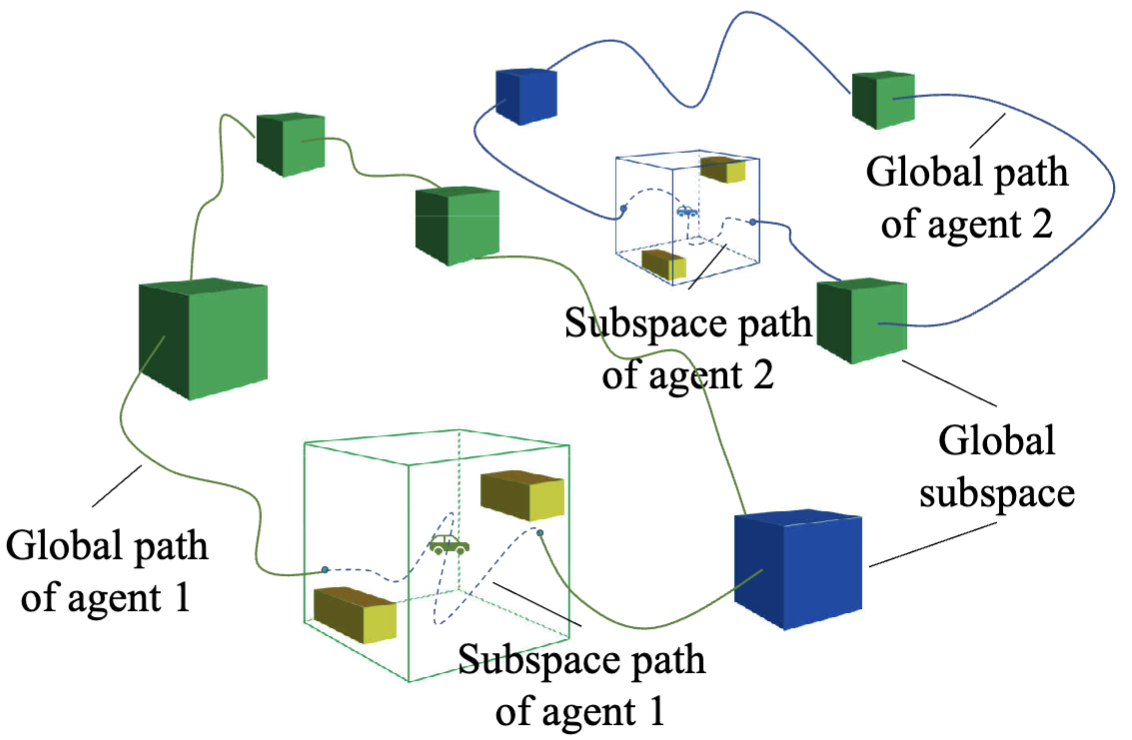
Multi-agent exploration of a bounded 3D environment with unknown initial positions of agents is a challenging problem. It requires quickly exploring the environments as well as robustly merging the sub-maps built by each agent. We take the view that the existing approaches are either aggressive or conservative: Aggressive strategies directly merge sub-maps when there seems to be overlap between two sub-maps, which can lead to incorrect merging due to the false-positive detection of overlap and is thus not robust. Conservative strategies direct one agent to revisit excessive amount of the history trajectory of another agent for verification before merging, which can lower the exploration efficiency due to the repeated exploration of the same area. To intelligently balance the robustness of sub-map merging and exploration efficiency, we develop a new approach for lidar-based multi-agent exploration, which can direct one agent to repeat another agent’s trajectory in an adaptive manner based on the quality indicator of the sub-map merging process. Additionally, our approach extends the recent single-agent hierarchical exploration strategy to multiple agents in a cooperative manner by planning for agents with merged sub-maps together to further improve the exploration efficiency. Our numerical results show that our approach is xxx more efficient than the baselines on average while maintaining the robustness of sub-map merging.
The major contributions of MACX include:
- We developped a novel large-scale multi-agent exploration method.
- The proposed method don’t relay on initial information of other agents.
- The proposed method can incrementally explore unknown environments.
- The proposed method can achievely increase overlaps between agents to improve mapping.
Publications
BibTeX:
@article{yin2022isimloc,
title={iSimLoc: Visual Global Localization for Previously Unseen Environments with Simulated Images},
author={Yin, Peng and Cisneros, Ivan and Zhang, Ji and Choset, Howie and Scherer, Sebastian},
journal = {IEEE Transactions on Robotics, Conditional Accepted},
url = {https://arxiv.org/abs/2209.06376},
year={2022},
}