Published: Dec 23, 2022 by C.S. Rhymes
Background and Major Contributions
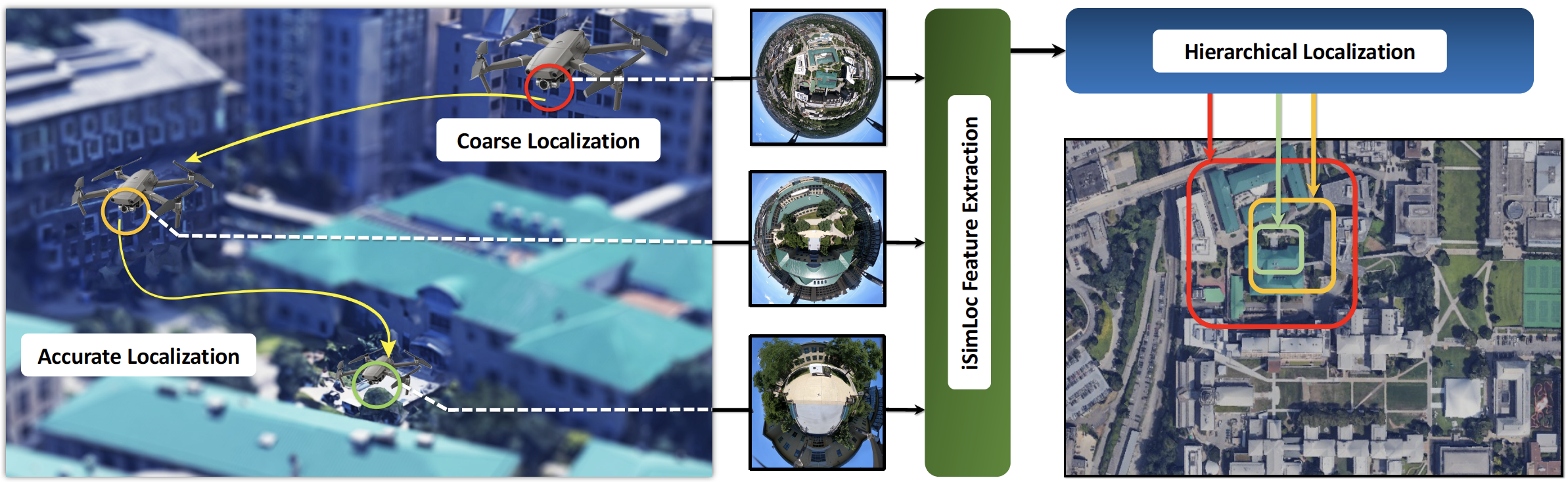
The visual camera is an attractive device in beyond visual line of sight (B-VLOS) drone operation, since they are low in size, weight, power, and cost, and can provide redundant modality to GPS failures. However, state-of-the-art visual localization algorithms are unable to match visual data that have a significantly different appearance due to illuminations or viewpoints. This paper presents iSimLoc, a condition/viewpoint consistent hierarchical global re-localization approach. The place features of iSimLoc can be utilized to search target images under changing appearances and viewpoints. Additionally, our hierarchical global re-localization module refines in a coarse-to-fine manner, allowing iSimLoc to perform a fast and accurate estimation. We evaluate our method on one dataset with appearance variations and one dataset that focuses on demonstrating large-scale matching over a long flight in complicated environments. On our two datasets, iSimLoc achieves 88.7% and 83.8% successful retrieval rates with 1.5s inferencing time, compared to 45.8% and 39.7% using the next best method. These results demonstrate robust localization in a range of environments.
The major contributions of iSimLoc include:
- We developped a novel long-term (variant illumiations) and large-scale (150km) UAV navigation method.
- The proposed method can achieve accurate without been there .
- The proposed method only requires 5~10% original data for model training
- The proposed method can provide large-scale re-localization under challenge terrains.
Publications
BibTeX:
@article{yin2022isimloc,
title={iSimLoc: Visual Global Localization for Previously Unseen Environments with Simulated Images},
author={Yin, Peng and Cisneros, Ivan and Zhang, Ji and Choset, Howie and Scherer, Sebastian},
journal = {IEEE Transactions on Robotics, Conditional Accepted},
url = {https://arxiv.org/abs/2209.06376},
year={2022},
}